Si en nuestro primer post nos hacíamos eco de que una de las líneas de investigación existentes en la actualidad iba destinada a conseguir «vehículos que circulen sin un conductor humano«, hoy vamos a mostrar un proyecto concreto que se está desarrollando en la actualidad en esta línea.
El proyecto SARTRE (nada que ver con el filósofo existencialista francés), obtiene su nombre de parte de las iniciales de una frase que muestra una analogía muy acertada con la esencia del proyecto: «SAfe Road TRains for de Environment» (Trenes de carreteras para el medio ambiente).
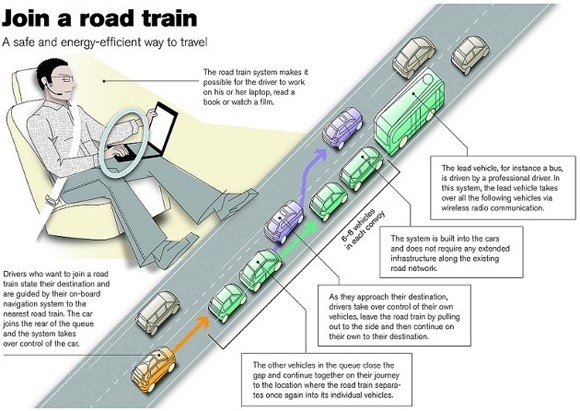
La idea que subyace del proyecto es aprovechar la tecnología existente que permite a un vehículo mantener una distancia uniforme con el que le precede (utilizando múltiples sensores, y localización GPS), para crear «trenes de vehículos», que permitan tener una conducción autónoma de los mismos.
De esta forma, el conductor entra en la autopista/autovía, y se une a la fila de vehículos (que están situados a una distancia uniforme), que están siguiendo al vehículo guía (dirigido en todo momento por una persona). A los pocos segundos, el coche puede empezar a circular de manera completamente autónoma dentro del convoy, manteniendo la distancia con el coche que se encuentra delante. Cuando el conductor ha llegado a su destino, simplemente se sale del convoy (de forma manual), y el resto de vehículos se vuelven a colocar correctamente, manteniendo las distancias.
El proyecto tiene en cuenta además otros factores externos prioritarios para garantizar la seguridad de peatones y vehículos, incorporando sistemas de frenado automáticos (al detectar, por ejemplo, un peatón que cruza la carretera), las condiciones meteorológicas o incluso el propio estado de la carretera.
Las ventajas parecen claras: Tiempo útil (los conductores pueden realizar cualquier actividad mientras están en el convoy), seguridad, mejoras ambientales (reducción de las emisiones contaminantes, al mantener una velocidad más uniforme) y de gestión del tráfico. Sin embargo, hay que ser conscientes de que al ser un proyecto crítico para la seguridad vial, sólo un nivel de 100 % de fiabilidad en el sistema sería válido, lo que va a complicar enormemente la adopción del sistema en un entorno real. De todas formas, parece claro que es una línea interesante de investigación por la que hay que apostar, ya que abre la puerta a la conducción automática de vehículos.
Este proyecto, financiado parcialmente por la Comisión Europea, está siendo desarrollado por las siguientes empresas e instituciones:
* Ricardo UK Ltd, del Reino Unido, líder del proyecto
* Applus+Idiada, de España
* Robotiker-Tecnalia, de España
* Institut für Kraftfahrwesen Aachen (IKA), de Alemania
* SP Technical Research Institute, de Suecia
* Volvo Car Corporation & Technology, de Suecia
Merece la pena destacar la presencia de las dos entidades españolas, la empresa Applus+ IDIADA, dedicada al desarrollo de soluciones innovadoras para el mundo del automóvil, y el centro tecnológico ROBOTIKER-TECNALIA, dedicados a la Investigación y Transferencia Tecnológica de los resultados.
Os muestro a continuación un vídeo que refleja el avanzado estado del proyecto.
Comentarios: 2
Los comentarios están cerrados.